

בפוסט השני בנושא עדשות ועצמיות אדון בנושא הבא:
4. סוגי עצמיות: עצמיות בעלות אורך מוקד קבוע (Prime Lenses) ועצמיות בעלות אורך מוקד משתנה (Zoom Lenses), עצמיות מאקרו לצילום מקרוב, עצמיות Tilt-Shift
סוגי עצמיות:
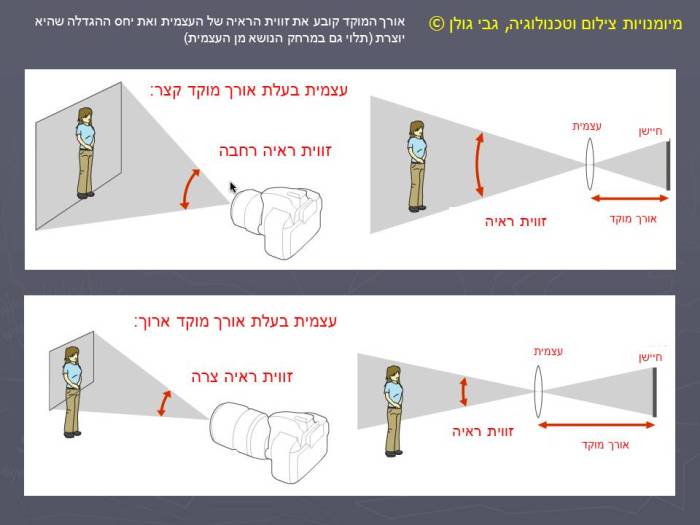
לעצמית בעלת אורך מוקד קבוע זווית ראייה וצמצם פתוח מירבי קבועים. עצמיות בעלות אורך מוקד קבוע נקראות באנגלית Prime Lenses. לעצמיות בעלות אורך מוקד משתנה (Zoom Lenses) זויית ראייה משתנה והצמצם הפתוח המירבי עשוי להיות קבוע (בעצמיות איכותיות יותר) על פני כל תחום אורכי המוקד של העצמית או משתנה (בעצמיות פחות איכותיות).

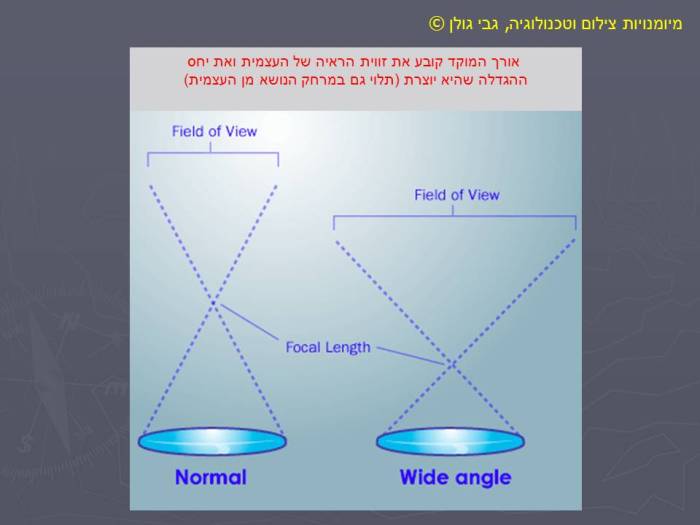
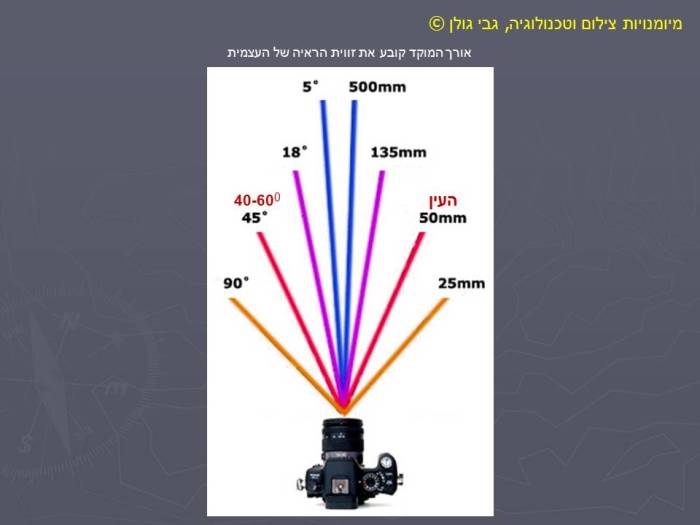
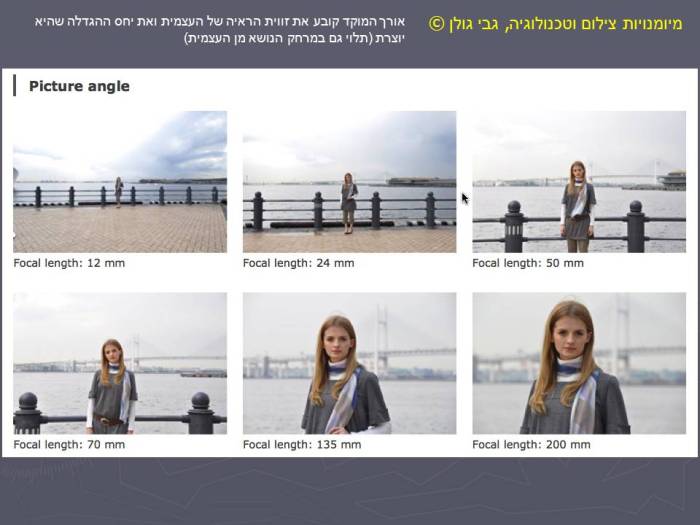
הדגמת פעולתה של עצמית זום בשני אורכי המוקד הקיצוניים שלה: זווית הראייה משתנה בהתאם לאורך המוקד.
 תנועת האלמנטים בעצמית זום מאורך מוקד של 55 מ״מ ועד 200 מ״מ
תנועת האלמנטים בעצמית זום מאורך מוקד של 55 מ״מ ועד 200 מ״מ
מה עדיף? עצמית Prime או עצמית Zoom?
יתרונות של עצמיות Prime:
חדות וכושר הפרדה (תלוי ברמה הכללית של העצמית), ניגוד גבוה יותר, בד״כ פחות עיוותים וסטיות צבע. בעיית המיקוד המשתנה בצמצמים שונים פחות מפריעה, פחות עיקום השדה.
צמצם מקסימלי פתוח יותר ולכן אפשרות שליטה טובה יותר בעומק השדה.
שליטה מדוייקת על המיקוד לצורך ביצוע הערמת פוקוס (Focus Stacking)
עמידות וחוזק מכני עדיפים (פחות חלקים נעים)
גודל ומשקל: ניידות עדיפה
מחיר נמוך יותר (לעצמית יחידה, באותו תחום של רמת איכות כללית)
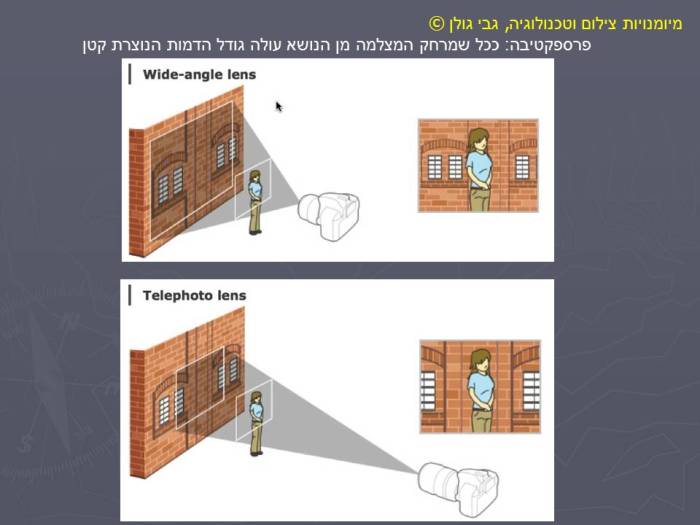
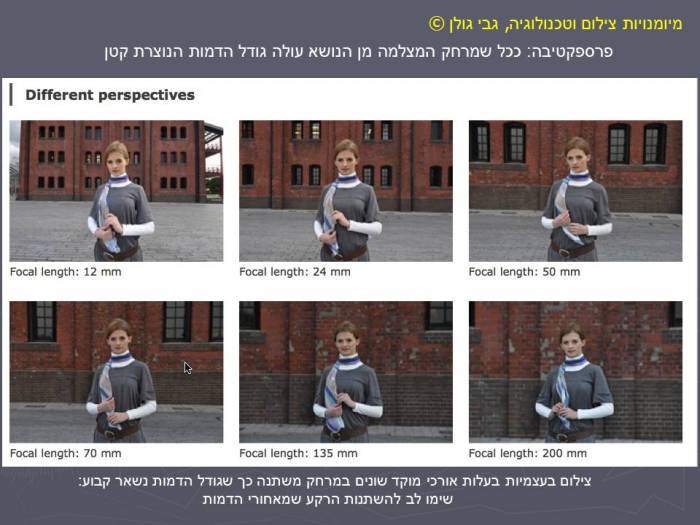
עצמיות פריים מעודדות את הצלם להתקרב לנושא ולמצוא את מרחק הצילום והפרספקטיבה האופטימליים עבורו.
יתרונות של עצמיות Zoom:
גמישות: במקומות בהם התנועה מוגבלת ו/או הנושא נע או משתנה במהירות. כמו כן במצבים בהם לא ניתן להחליף עצמיות בזמן הצילום עקב רטיבות, אבק וכו׳.
קלות שימוש (ועם זאת מציאת השילוב המתאים של מרחק הצילום והפרספקטיבה אינה טריוויאלית)
התאמה לשימוש מיוחד (במיוחד בוידאו/קולנוע)
מחיר נמוך יותר (לעומת מספר עצמיות Prime)
עצמיות זום מתאימות במיוחד לשימוש במצבי צילום בהם אין זמן לעסוק בהחלפת עצמיות תוך כדי הצילום, כמו בצילום ארועים, צילום חדשותי וצילום של Action Shots.
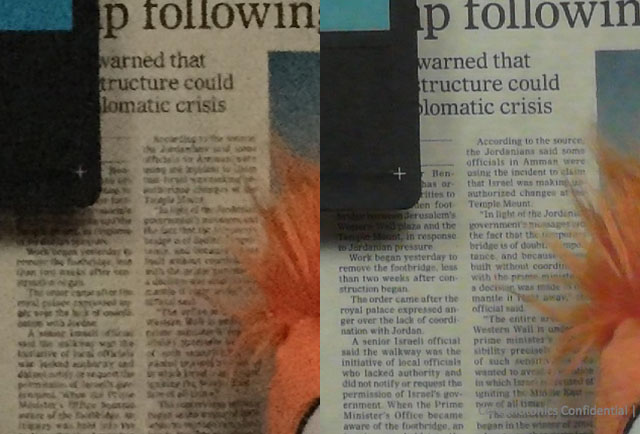
תופעה יחודית לעצמיות זום היא תופעת ״המיקוד הנושם״ (Focus Breathing): זווית הראייה ויחס ההגדלה משתנים לא רק כתלות באורך המוקד אלא גם כתלות במרחק הצילום. במקרים רבים, צלם שמשתמש בעצמית זום אחת לא ישים לב לתופעה אולם אם משווים 2 עצמיות זום שונות באותו טווח אורכי המוקד התופעה עשוייה להתגלות:
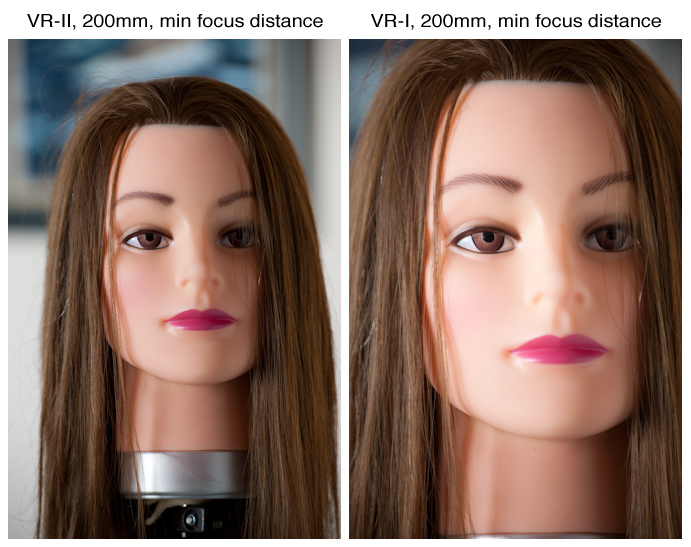
צילום בשני דגמים שונים של עדשת זום 70-200 של Nikon, במצב 200 מ״מ מאותו המרחק
מקור: gregphoto.com
בסרטון המדגים את התופעה תוכלו לצפות כאן.
תופעת ה-Focus Breathing אפיינית בעיקר לעדשות Zoom מסוג Variable Focus, לעומת עדשות Zoom מסוג Parfocal שכמעט אינן סובלות מן הבעיה. עדשות מסוג Parfocal נמצאות בשימוש בעיקר בתחום הקולנוע והטלויזיה מאחר והן מאפשרות לבצע Zoom In או Zoom Out ללא שינוי המיקוד. בצילום Stils בכל מקרה ממקדים מחדש לאחר שינוי הקומפוזיציה כך שאין בעיה להשתמש בעדשות Variable Focus.

גם החדות של עצמיות זום עשויה להשתנות בהתאם לאורך המוקד ובהתאם למרחק הצילום (וכמובן גם בהתאם לצמצם). כל ההבדלים הללו בין גודל הדימוי וחדותו נובעים מן המאפיינים האופטיים היחודיים לתכנון האופטי של כל עצמית זום.
עצמיות מאקרו:
סוג נוסף של עצמיות שהמאפיינים שלהן שונים מאשר עצמיות רגילות הן עצמיות לצילום מקרוב הידועות כעצמיות מאקרו (Macro). בעוד שעצמיות רגילות מיועדות להקרין דימוי מוקטן של נושא גדול על פני חיישן התמונה הרי שעצמיות מאקרו מיועדות להקרין דימוי מוגדל של נושא קטן. עצמית מאקרו ״אמיתית״ תהיה מסוגלת ליצור דימוי שגודלו זהה לגודל הנושא על פני החיישן, ביחס הגדלה של 1:1. אם זאת, גם עצמיות בעלות יחס הגדלה קטן יותר של 1:3 או 1:2 מכונות עצמיות מאקרו. בעוד שעצמיות רגילות מתוכננות לצילום ממרחק גדול מן הנושא, עצמיות מאקרו מתוכננות לצילום ממרחק קצר מאד (מספר סנטימטרים) מן הנושא. דוגמא לעצמית מאקרו יעודית היא העצמית הפופולרית
AF Micro Nikkor 60 f2/.8D המסוגלת להגיע ליחס הגדלה של 1:1. עצמית מאקרו יחודית היא
Canon MP-E 65mm f/2.8 1-5x Macro Photo המסוגלת להגיע ליחס הגדלה של 5:1 (גודל הדימוי יהיה פי 5 מאשר גודל הנושא). בכוונתי לייחד בעתיד פוסט נפרד לנושא צילום המאקרו.
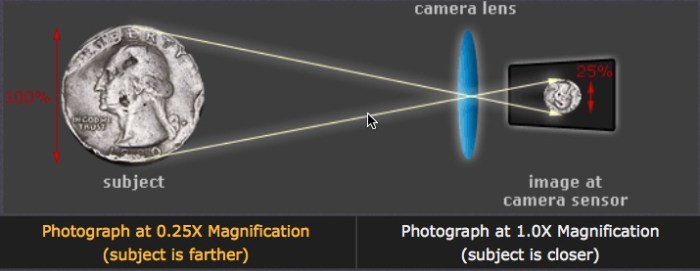
צילום ביחס הגדלה של 1:4: גודל הדימוי הוא 1/4 מגודל הנושא

צילום ביחס הגדלה של 1:1: גודל הדימוי זהה לגודל הנושא (בדוגמא זו גודל החיישן איננו מאפשר לכלול את כל הנושא על החיישן במצב 1:1 לכן רק חלק מן הנושא מופיע בדימוי)
מקור לשני האיורים הנ״ל: http://www.cambridgeincolour.com

Canon MP-E 65mm f/2.8 1-5x Macro Photo

צילום מאקרו ביחס הגדלה של כ- 1:1. צולם עם עצמית Micro Nikkor 105
צילום: גבי גולן
שימו לב לעומק השדה הרדוד בצילום הנ״ל הנובע בעיקר מן המרחק הקצר שבין העצמית לנושא.

השוואה בין יחסי הגדלה שונים שמאפשרות עצמיות שונות
מקור:http://media.digitalcameraworld.com
עצמיות Tilt-Shift:
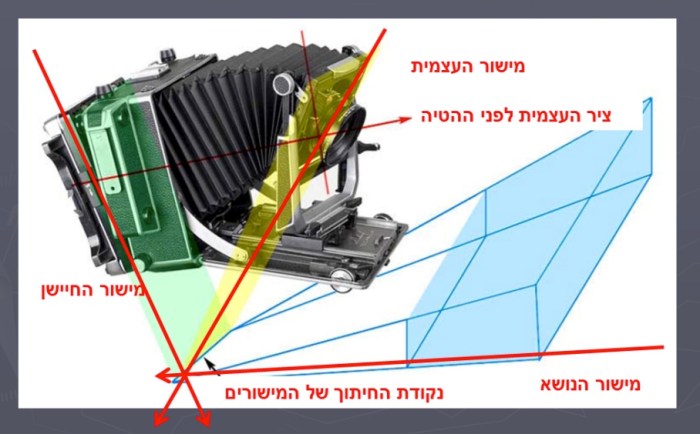
סוג מענין של עצמיות שאינן נמצאות בשימוש המוני הן עצמיות Shift-Tilt. עצמיות אלו מיועדות לתיקון אופטי של עיוותי פרספקטיבה הנוצרים כאשר מישור החיישן איננו מקביל למישור הנושא. נכון, ניתן כיום לתקן עיוותים אלו ברמה סבירה באופן דיגיטלי גם ללא שימוש בעצמיות יעודיות אבל איכות הדימוי תהיה שונה. כמו כן, באמצעות עדשות אלו ניתן ליישם את הכלל של (Scheimpflug (1865-1911 הקובע כי כאשר הקווים הנמשכים ממישור העצמית, מישור הנושא ומישור חיישן התמונה (או סרט הצילום) נפגשים כל מישור הנושא יהיה בפוקוס:
הנה שני דגמים של עצמיות Tilt-Shift מתוצרת Nikon ו-Canon:

בעצמיות אלו ניתן להסיט את האלמנטים האופטיים הקדמיים יחסית לאחוריים.


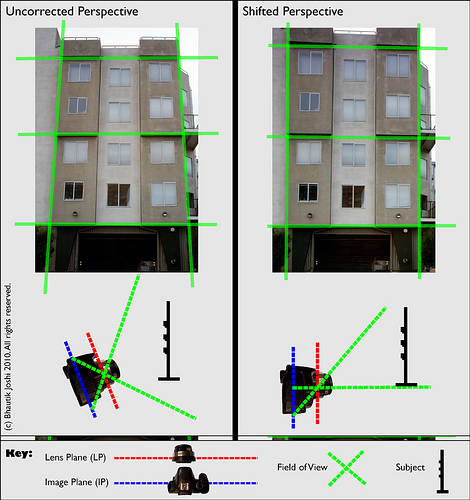
צילום נושא בעצמית רגילה (משמאל) ובעצמית Tilt-Shift (מימין).
מקור: http://cow.mooh.org
לסיכום, עצמיות Tilt-Shift מאפשרות תיקוני פסרספקטיבה וחדות ברמה האופטית כבר בעת הצילום. לצלמים העוסקים בצילום ארכיטקטוני זוהי כמובן האפשרות המומלצת.
בחלק הבא בסדרה זו אדון בצמצם והשפעתו על הצילום.
עדכון 7.6.25: מאמר מפורט על עקרונות המבנה של עדשות

















 השוואה בין צילום במצלמה אחת לבין שילוב שני צילומים משתי מצלמות יחד
השוואה בין צילום במצלמה אחת לבין שילוב שני צילומים משתי מצלמות יחד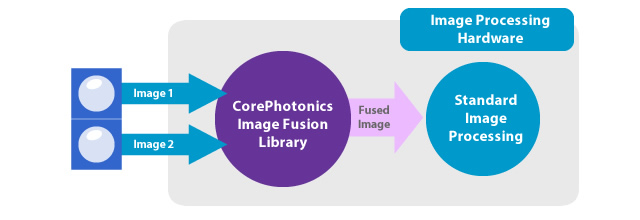



















{kind=link}