
בחלק השביעי והאחרון של סדרת הפוסטים העוסקת בעדשות ועצמיות אדון בנושא מדדי איכות לעצמיות: MTF ומדד DxO וכן בשיקולים שונים לבחירה בעצמיות. אסכם בשיתוף מספר מחשבות על עצמיות בכלל.
בפוסטים הקודמים סקרתי את עקרונות הפעולה והמאפיינים המרכזיים של עדשות ועצמיות. בין היתר התייחסתי לרשימה ארוכה למדי של סטיות מהן סובלות עדשות ועצמיות והסברתי שמידת התיקון של הסטיות קובעת את רמת האיכות הכללית של עצמית במשולב עם רמת האיכות המבנית, מכנית ואלקטרונית שלה. נשאלת השאלה כיצד יוכל המשתמש מן השורה להעריך את רמת האיכות של עצמית מסויימת? אני יוצא מתוך נקודת הנחה שמרבית הצלמים מעוניינים לצלם בעצמיות ולא לבלות את הזמן בבדיקות והשוואות ביניהן (למרות שיש להודות שיש ביננו גם כאלו שאין דבר שמלהיב אותם יותר מאשר השוואות כאלו). כאן כמובן באים לעזרתנו כל אותם אתרי אינטרנט, טובים יותר וטובים פחות המבצעים סקירות ובדיקות של עצמיות או ממחזרים בדיקות שנעשו ע״י אתרים אחרים…
אולם על מנת להבין ולהפיק את המירב מסקירות אלו חשוב להבין את העקרונות אותם סקרתי בפוסטים הקודמים.
אתייחס כאן לשני מדדים המקובלים כיום לצורך הערכת רמת האיכות האופטית של עצמית: MTF ומדד DXO.
MTF הוא מדד טכני מקובל המביא לידי ביטוי את רוב הסטיות האופטיות של עצמית באמצעות מדידה של כמות המידע שנמצא בדימוי שיצרה העצמית לעומת כמות המידע שנמצא בנושא המקורי. לצורך הפשטה ופשטות נעשה שימוש בנושא הכולל קווים שחורים ולבנים בצפיפויות משתנות והתוצאה מתקבלת כמערכת של עקומות שלא לגמרי פשוט להבין את משמעותן אולם אם מבינים את העקרון ניתן להשתמש בכלי זה באופן חזותי כפי שאסביר בהמשך.
מערכת הדמיה "לוקחת" דמות מבוא (הנושא המקורי) והופכת אותה לדמות מוצא (התמונה או הדימוי). כמשתמשי המערכת, אנו מעונינים לדעת עד כמה השתנתה דמות המוצא בהשוואה לדמות המבוא.
כאשר אנו מעבירים דרך מערכת ההדמייה נושא הכולל תדרים מרחביים משתנים (זהו תאור ״מדעי״ לאוסף של קווים שחורים ולבנים בצפיפות משתנה) נקבל את תגובת התדר המרחבי של מערכת הדמיה המכונה בשם המפוצץ פונקצית העברת האפנון (Modulation Transfer Function) ובקיצור MTF. זוהי פונקציה דו ממדית של התדרים המרחביים בכיוונים Y,X. בפועל, אנו מודדים כך את יכולת מערכת ההדמייה, ובמקרה שלנו מדובר בעצמית, להעביר בהצלחה את הניגוד (הקונטרסט) שבין הקווים הלבנים והשחורים. כל הסטיות האופטיות של עצמיות שהוזכרו בפוסטים הקודמים פוגעים ביכולתה של העצמית להעביר בהצלחה את הניגוד שהרי אם העצמית היתה אידיאלית איכות הדימוי היתה זהה לאיכות הנושא.
 האיור מדגים את יכולת העברת הניגוד של עצמית כלשהיא בשני מצבים: נושא בתדר גבוה (מימין) ונושא בתדר נמוך (משמאל). הניגוד המקורי בשני המקרים הוא 100%, אולם לאחר שהאור מן הנושא עבר דרך העצמית אנו מקבלים ניגוד נמוך מאד, 20% בלבד ביכולת ההעברה של התדר הגבוה בעוד שבהעברת התדר הנמוך התקבלה דמות מוצא בעלת ניגוד של 90%, תוצאה יפה לכל הדעות. אם נתרגם את המשפט האחרון למילים פשוטות יותר הרי שהעצמית הנבדקת איננה מסוגלת להעביר פרטים קטנים בנושא (אלא במידה מועטה בלבד) אולם מעבירה יפה פרטים גדולים. ניתן לומר אם כן שכושר ההפרדה של עצמית זו איננו מן המשובחים עקב צירוף הסטיות השונות מהן היא סובלת.
האיור מדגים את יכולת העברת הניגוד של עצמית כלשהיא בשני מצבים: נושא בתדר גבוה (מימין) ונושא בתדר נמוך (משמאל). הניגוד המקורי בשני המקרים הוא 100%, אולם לאחר שהאור מן הנושא עבר דרך העצמית אנו מקבלים ניגוד נמוך מאד, 20% בלבד ביכולת ההעברה של התדר הגבוה בעוד שבהעברת התדר הנמוך התקבלה דמות מוצא בעלת ניגוד של 90%, תוצאה יפה לכל הדעות. אם נתרגם את המשפט האחרון למילים פשוטות יותר הרי שהעצמית הנבדקת איננה מסוגלת להעביר פרטים קטנים בנושא (אלא במידה מועטה בלבד) אולם מעבירה יפה פרטים גדולים. ניתן לומר אם כן שכושר ההפרדה של עצמית זו איננו מן המשובחים עקב צירוף הסטיות השונות מהן היא סובלת.
הגרף שבתחתית האיור מראה לנו את הניגוד (המודולוציה, 0%=אין ניגוד כלל, 100%=ניגוד מירבי) לעומת צפיפות הקווים השחורים והלבנים בזוגות קווים למ״מ (כלומר כמה זוגות קווים שחור-לבן נכנסים למ״מ אחד). הגרף מראה שככל שצפיפות הקווים עולה, יכולת העצמית להדמות אותם הולכת ויורדת.

סימולציה של יכולת העברת הניגוד מ-100% עד 2%
נבדוק כעת כיצד משתמשים ב- MTF לצורך הערכת רמת האיכות האופטית של עצמית אמיתית. בדוגמא שלפנינו נבדוק עצמית מתוצרת Canon 50/1.4:

הציר האנכי מתאר את הניגוד: 0=0% ניגוד, 1=100% ניגוד (מקסימום)
הציר האופקי הינו במ"מ ומתאר את המרחק ממרכז העצמית לקצוות.
הקווים העבים מתארים את השתנות הניגוד לדמות ברזולוציה של 10 זוגות קווים למ"מ, משמשים למדידת הניגוד.
הקווים הדקים ב- 30 זוגות קווים למ"מ, משמשים למדידת כושר ההפרדה.
הקווים השחורים מתארים את הניגוד בצמצם פתוח, 1.4 והכחולים בצמצם 8.
הקווים השלמים הם מרידוניאליים (ניצבים לאלכסון המסגרת) והשבורים סגיטאליים (מקבילים לאלכסון המסגרת): ראו באיור הבא:

בדוגמא הבאה נשווה בין שתי עצמיות בהתבסס על עקומות ה- MTF שלהן:
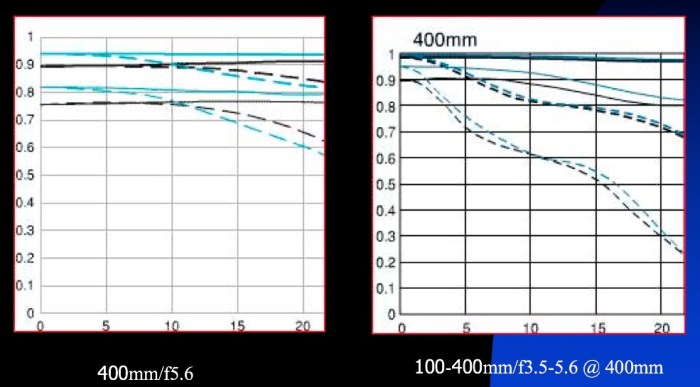
מימין עקומות MTF לעצמית זום 100-400 מ״מ במצב 400 מ״מ. משמאל עצמית Prime 400 מ״מ. ללא ספק ביצועי עצמית ה-Prime עולים בהרבה על ביצועי עצמית הזום במצב 400 מ״מ. כושר העברת הניגוד של עצמית ה-Prime טוב בהרבה והניגוד נשמר היטב גם במרכז וגם בקצוות העצמית. הדבר בא לידי ביטוי חזותי בכך שקצב ירידת העקומות המתארות את עצמית ה-400 מ״מ נמוך בהרבה מקצב ירידית העקומות המתארות את עצמית הזום. כך שגם אם אין ברצונכם לפענח את המשמעות של כל קו, מספיק להשוות את קצב ירידת העקומות: העקומה היורדת בקצב איטי יותר מתארת עצמית טובה יותר. מהיכן מגיע היתרון? במקרה זה חלק מן ההסבר הוא העובדה שלאור המבנה האופטי המסובך וריבוי האלמנטים עצמיות זום תהינה פחות חדות מאשר עצמיות פריים ברמה מקבילה. כמו כן ההבדל נובע ממידת התיקון של הסטיות השונות. תיקון ברמה גבוהה יבוא לידי ביטוי במחיר העצמית.
ניסיון מענין לפשט ולהנגיש את כל אופן ההשוואה ביו עצמיות הוא מדד DxO.
מדד DxOMark להערכת האיכות של עצמיות (וחיישני תמונה) פותח על מנת לספק אמצעי פשוט לשימוש המאפשר השוואה קלה וברורה בין הביצועים של עצמיות שונות אולם עם זאת הינו מבוסס מבחינה מדעית וטכנולוגית.

מדד DxOMark להערכת האיכות של עצמיות (ומצלמות) מבוסס על הגורמים הבאים:
חדות (Sharpness): חדות הינה מאפיין סובייקטיבי של עצמית או דימוי. החדות מתארת את האיכות החזותית הנתפשת של פרטים בדימוי או פרטים ששועתקו ע"י העצמית. החדות קשורה גם לכושר ההפרדה וגם לניגוד: הציון של DxOMark לחדות מבוסס על ערך הנקרא Perceptual Megapixels המשקלל את ה- MTF של העצמית עם יכולת הראייה האנושית. ערך גבוה יותר הוא טוב יותר.
יכולת העברת האור (Transmission): מתארת את יכולתה של העצמית להעביר אור מן הנושא המצולם לשטח הפנים של חיישן התמונה. עצמיות מורכבות ממספר אלמנטים אופטיים מזכוכית כאשר כל אחד מהם מחזיר או בולע חלק מן האור העובר דרכו. לכן, ככל שיש בעצמית יותר אלמנטים כך יכולת העברת האור שלה תהיה נמוכה יותר. ערך נמוך יותר הוא טוב יותר.
עיוות (Distortion): נגרם ע"י שינויים ביחס ההגדלה של הדימוי שיוצרת העצמית על פני שדה הדימוי. באופן מעשי עיוות צילומי מתאר את המידה בה עצמית איננה מסוגלת ליצור קו ישר בדימוי כאשר הקו בנושא הינו ישר. נמדד באחוזים, ערך קטן יותר הוא טוב יותר.
נפילת אור בקצוות (Vignetting): שינוי מתקדם בבהירות הדימוי מן המרכז החוצה, כלומר פינות המלבן של מסגרת הדימוי יהיו כהות יותר מאשר מרכז הדימוי. נמדד בסטופים. ערך קטן יותר הוא טוב יותר.
סטייה צבעונית רוחבית (Lateral Chromatic Aberration): הדימוי של גבול חד בין שחור ללבן ידגים שוליים צבעוניים (בעיקר מג'נטה, כחול או אדום) משני צידי הגבול. התופעה נגרמת כתוצאה מכך שעדשות אינן ממקדות את כל אורכי הגל באותה הנקודה. נמדד במיקרונים, ערך קטן יותר הוא טוב יותר.
בדוגמא הבאה נראה את פרוט מדד DxO לעצמית Sony FE Carl Zeiss Sonnar T* 55mm f1.8 ZA:
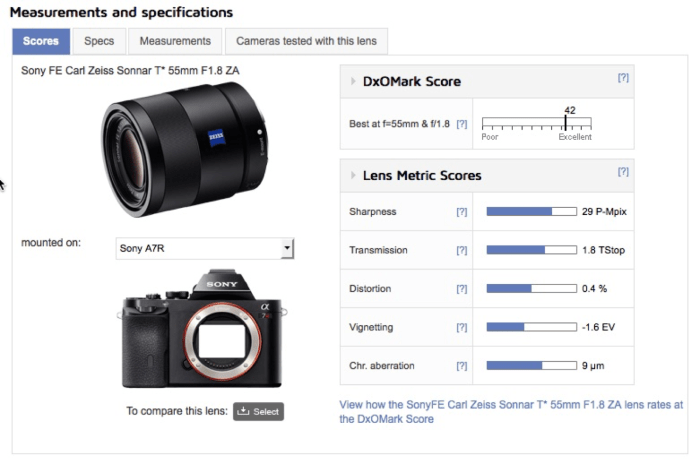
לעצמית זו דרוג כללי גבוה 42, וחדות שוות ערך ל- 29MP. חשוב להדגיש שמדד החדות תלוי גם בחיישן: לאור הקשר בין כושר ההפרדה של העצמית לזה של החיישן כפי שהוסבר בפוסט מס׳ 79 חשוב לשים לב למצלמה איתה נבדקה העצמית: שידוך של מצלמות שונות יביא לתוצאות שונות: שידוך עצמית נתונה לחיישן בעל כושר הפרדה גבוה יותר יגרום בדרך כלל לעליה (גם אם מתונה) בציון החדות של העצמית.
והנה פרוט מדד DxO לעצמית באיכות נמוכה: Sony DT 18-55mm f3.5-5.6 SAM:
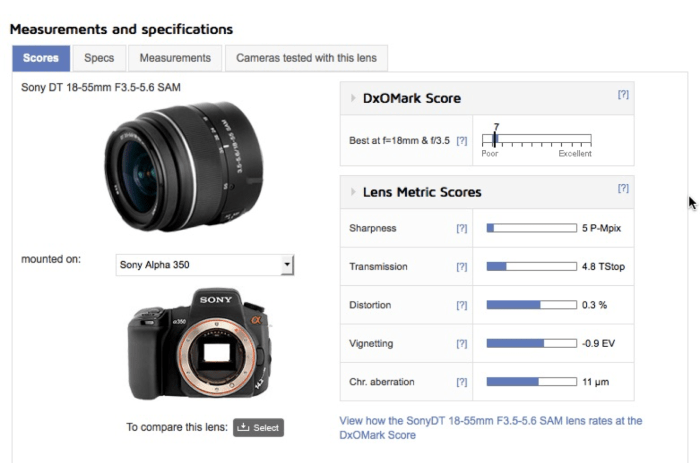
הציון הכללי נמוך מאד, 7, ודרוג החדות הוא 5MP בלבד. גם שאר המדדים נמוכים בהתאם.
הבה נבדוק 2 עצמיות דומות מבחינת תחום אורכי המוקד שלהן:
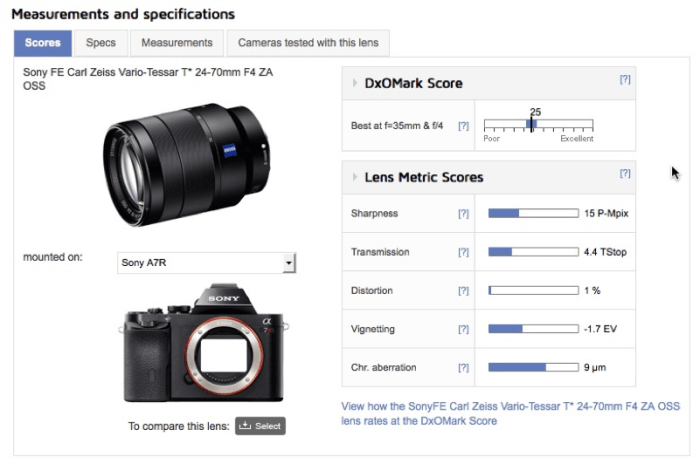
מחיר עצמית זו הינו $1198

מחיר עצמית זו הינו $498
לאור הנתונים של שתי העצמיות, איזו עצמית כדאי לרכוש? במקרה זה התשובה די ברורה: ביצועי שתי העצמיות דומים מאד, המחיר הגבוה של העצמית הראשונה איננו מוצדק, לפחות לדעתי. יש גם הבדל ניכר במשקל של שתי העצמיות דבר שאינו בא לידי ביטוי במדד DxO.
מדד DxO לעצמיות מספק לנו אמצעי נוח וברור להשוואה ביו עצמיות שונות ללא הצורך לצלול לתוך עשרות עקומות MTF ונתונים מסובכים. אני בהחלט ממליץ על מדד זה ככלי עזר מצויין לגיבוש ההחלטה בכל הנוגע לרכישה של עצמיות.
אם כך, מה כדאי לבדוק כאשר שוקלים לרכוש עדשה חדשה?
אפשר להתבסס על השאלות הבאות:
מהן ההעדפות האישיות שלי לגבי אורך המוקד?
מהו סגנון הצילום שלי? האם אני מצלם גם וידאו?
האם עדשה כבדה תתאים לי? כמה אני מוכן לשלם?
מהן הדרישות שלי לגבי האיכות האופטית של העדשה?
האם אני מדפיס את הצילומים שלי? באיזה גודל?
איזו מצלמה יש לי? מה גודל החיישן? מה היא רזולוציית החיישן?
מהם תנאי התאורה בהם אני מצלם בד"כ? האם מוצדק עבורי לשלם עבור עדשה מהירה?
האם לרכוש עדשת זום או עדשות Prime?
מהי איכות הבנייה והעמידות של העדשה?
האם יש צורך באטימות למים/אבק?
האם כדאי לרכוש או לשכור?
האם לרכוש עדשה חדשה או משומשת?
מיקוד אוטומטי או ידני?
עצמית עם מנוע מיקוד או בלעדיו?
ייצוב אופטי כן/לא? האם יש מייצב במצלמה או שהעצמית צריכה להיות מיוצבת?
אם כך, למעשה, מה ההבדל בין עצמית שמחירה $150 לזו שמחירה $15,000? את התשובה המפתיעה אולי תמצאו בסרטון המשעשע הזה. ובפרוט הניסוי תוכלו לצפות כאן.
בסופו של דבר, כמו כל החלטת רכישה אחרת רק בעל הענין יכול להחליט מה מתאים לו. הבעיה היא שרבים מדי נוטים להסתמך על כל מיני מיתוסים שונים ומשונים ועל אקסיומות המרחפות במרחבי הסייבר ועקב כך רוכשים עצמיות (ומצלמות) שאינן מתאימות להם. צלמים רבים מתפתים לרכוש עצמיות יקרות שאינן מספקות להם שום ערך מוסף מלבד המחיר הגבוה. מצד שני מוכרים גם המקרים בהם צלמים משקיעים במצלמות איכותיות ברזולוציה גבוהה אולם לא דואגים להתאים למצלמות אלו עצמיות שיביאו לידי ביטוי את כושר ההפרדה הגבוה של החיישן. כדברי האמרה הידועה: ״צריך שניים לטנגו״ וזה נכון גם בצילום.
מומלץ לבדוק עצמיות שבכוונתכם לרכוש באמצעות השכרה אם הדבר מתאפשר. כך תוכלו להתרשם מכל המאפיינים של העצמית ולהחליט האם היא לטעמכם ולכיסכם. בהצלחה!
עדכון 4.1.22: DPReview.com משנים את אופן הבדיקה של עדשות
עדכון 7.6.25: מאמר מפורט על עקרונות המבנה של עדשות






